
4D成像雷达,大战打响
2024-06-12
11:27:28
来源: 李寿鹏
点击
因为智能驾驶的火热,4D成像雷达正在成为风口浪尖。


一方面,曾在2019年豪言使用纯视觉来实现FSD的特斯拉在去年年底宣布,将在第4代自驾车平台重新纳入一颗4D毫米波雷达;另一方面,作为激光雷达的潜在竞争对手,4D成像雷达的性能正在提升,在提供更高性价比的同时,进一步挤压了激光雷达的空间。
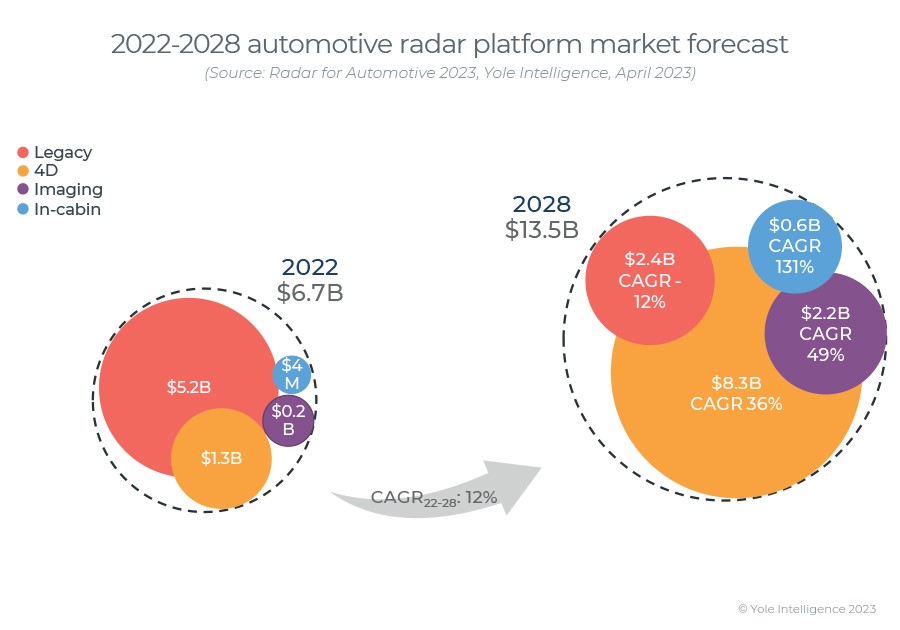
虽然围绕着这个技术的争论不断,但各大主机厂、Tier 1和芯片公司却毫不掩饰地围绕着4D成像雷达推陈出新。据Yole统计显示,2022年,4D成像雷达的市场规模仅为2亿美元。到2028年,这个数字将提高到22亿美元,期间的年复合增长率高达49%。
由此可见,4D成像雷达,大有可为。
4D成像雷达,不输激光雷达
其实毫米波雷达并不是什么新技术,早在上世纪四五十年代就被研发出来并付诸应用了。但在过去20多年里,我们说的毫米波雷达是指能测量距离、速度和水平角度三个方面的数据的传统3D雷达。在一般的ADAS应用中,这样的雷达应用也足够。
但现在,随着智能驾驶的普及加速,传统雷达的分辨率差、行人反射率低和噪音,以及只能用于探测移动目标,很难分辨其他静止物体(如道路、栅栏、标志等)等天然缺点被无限放大。但毫米波雷达的一些天然特性又让他们成为汽车智能化方案的选择。
为此,整个行业就对毫米波雷达提出了新的要求。
例如原来雷达要求探测距离100米左右就够了,但现在很多项目都需要150米,前雷达方面甚至要求达到300米以上;同时,在要求雷达能看得远的时候,近距离的弱目标也要求能很好地探测出来;来到点云数方面,过去,一般雷达要求是一帧要有300左右的点云数,但现在,这个数据要达到1000甚至2000。
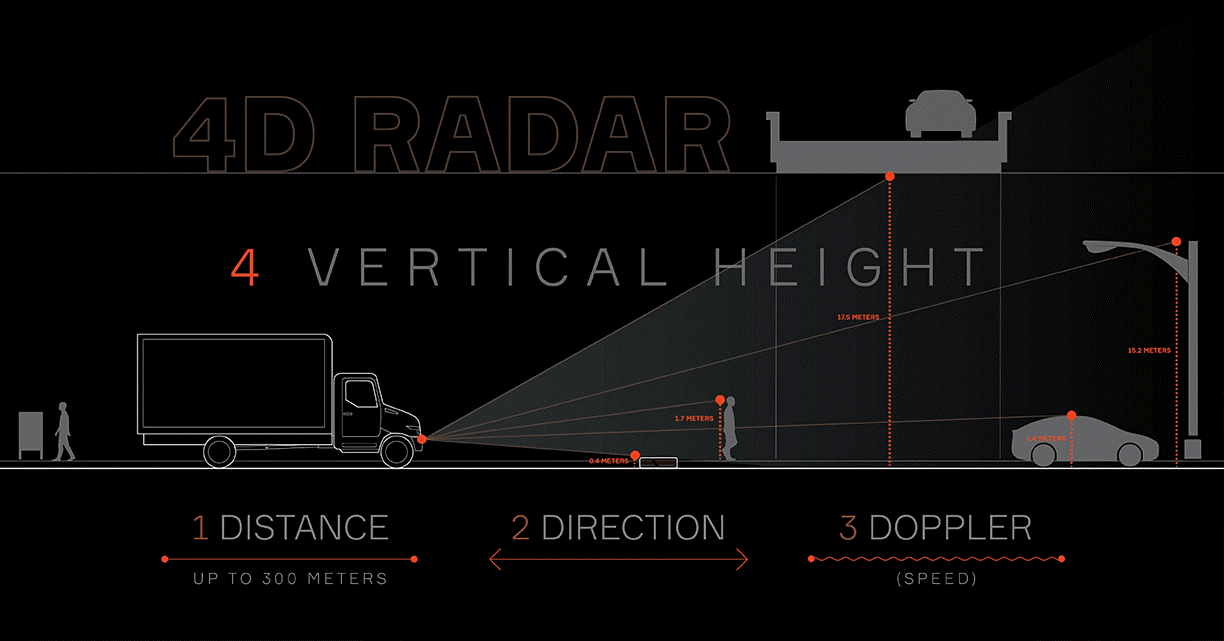
为了解决上述问题,4D成像雷达——一种在传统雷达基础上加上一个垂直角度检测、提高了输出点密度且具备更高分辨能力的雷达迅速走红。
4D雷达工作原理展示(图片来源:IoT Automotive News)
因为在分辨率、识别距离和点云数方面都有了大幅度的提升,4D成像雷达能探测到相对速度、距离、方位角和高度等数据。同时,4D成像雷达还具有足够高的动态范围,以区分远距离的较小障碍物。进而能够识别出如路标、静态物体和较远距离以外的物体,这是传统的毫米波雷达无法做到的。
加特兰微电子科技公司(以下简称“加特兰”)创始人兼CEO陈嘉澍博士也告诉半导体行业观察,4D成像雷达和传统ADAS雷达的区别主要体现在两方面:一是角度分辨能力是后者的一倍以上,二是点云的数量,也较之后者提升一个数量级。“因此4D成像雷达需要更多的MIMO通道,更强的运算能力和更多的存储资源。”陈嘉澍博士强调。他进一步指出,在很多场景下,4D成像雷达甚至拥有多项激光雷达所不具备的优势。
“首先,作为一种光学雷达,激光雷达光学传感器跟人眼一样有天生缺点,那就是在雨雾天气,强光天气,有干扰情况下都不工作。但毫米波雷达却是唯一全天候、不受天气、不受光线影响的传感器;其次,毫米波雷达对速度测量更加精确,也比光学传感器在处理复杂场景上更具优势;再者,主动安全的普及,包括最近美国NHTSA出台的2029年所有车都要标配AEB系统,这就必须要毫米波雷达配合;此外,从成本来讲,现在激光雷达确实也变得越来越便宜。但无论激光雷达的成本再怎么降低,它依然会比毫米波雷达贵几倍,两者之间会维持在5到10倍的差距。”陈嘉澍博士接着说。
加特兰创始人兼CEO陈嘉澍博士
值得一提的是,在去年年中,全球领先的Tier 1供应商博世就宣布退出高端自动驾驶汽车激光雷达传感器的开发,并将资源重新分配到毫米波雷达和其他传感技术上,这足以印证毫米波雷达技术的大有可为。
在进入4D成像雷达时代,这些优势表现得尤为明显。特别是在毫米波雷达从过去的砷化镓、硅锗制造,进入到了CMOS制造时代以后,供应商能够提供集成度更高、性能更好且成本更优的方案,进一步巩固了4D成像雷达在智能驾驶中的地位。
巨大的市场前景,就吸引了传统和新兴的毫米波雷达新贵,投身这个市场。
群雄逐鹿,本土厂商突围
我们不得不承认的是,和很多其他芯片一样,毫米波雷达的这个市场,一直都是被海外巨头垄断的市场。
据Yole统计,大陆集团、博世、海拉、安波福、电装和Veoneer这六大公司掌控着毫米波雷达市场。具体到芯片方面,18亿美元的市场主要被NXP、英飞凌等厂商瓜分。而在进入4D成像雷达市场以后,整体竞争格局变化不大。毫米波领先的芯片厂商基本还是领先的4D成像雷达芯片供应商,但有不少新的竞争对手涌现。
如瑞萨通过收购 Steradian 以扩大其在雷达市场的影响力;Arbe早在2019年推出车载4D毫米波雷达产品;擅长做ADAS芯片的Mobileye也在这个领域异军突起;Altos Radar 在 2024 CES上推出了其突破性的 4D 成像雷达。加特兰也在近日推出了基于Andes平台打造的双片级联的成像雷达解决方案,加入了日趋火热的4D成像雷达市场。
在新能源汽车快速崛起的当下,加特兰的这个方案的发布,显得尤为重要。
“在产品上,我们跟竞争对手打一些差异化竞争。通过差异化的架构和创新来实现雷达系统性能的飞跃。”加特兰技术总监刘洪泉在谈到公司在4D成像雷达市场上的布局时说道。“与当前市面上的方案比较来看,Andes解决方案基本代表了目前毫米波雷达技术的最前沿,集众多强大功能于一身,可实现4D高端雷达以及成像雷达功能。”刘洪泉补充说。
从技术上看,4D成像雷达的创新解决方案旨在提高分辨率以及其他性能指标,以满足 ADAS/AD 应用的要求。而要实现更高的分辨率需要更大的孔径,这与发射和接收通道的数量以及天线阵列设计有关。因此在射频模块方面,Andes方案包含了基于传输线设计的 7 比特移相器以实现更好的 MIMO 性能、优化的布局,有助于实现更好的隔离度;多级波形加载架构能支持灵活生成各种波形,精确的数字补偿单元等功能;集成的 JTAG、Aurora 的多种接口、多个数据通道以及分析模块,能让方案在调试的时候游刃有余。
对于4D成像雷达而言,还有另一个关注点,那就是如何在单个系统中集成更多 TX/RX 通道,以提高其分辨率。针对这个问题,加特兰在Andes方案上引入基于全自研C2C(chip to chip)接口的灵活级联技术(Flex-Cascading),灵活级联多颗芯片,潜在地降低硬件设计的复杂性并优化雷达传感器的整体尺寸及其功耗。来到软件开发方面,开发者也可以在多个芯片级联的时候,复用和单芯片时候一样的软件,这进一步降低了开发者的开发成本。值得一提的是,这些级联SoC不仅射频模拟能做到同步,组成更大的收发阵列,还能实现数据的交换和同步。
Andes SoC芯片以及Andes SoC两片级联参考设计方案
为了应对数据量大增带来的处理需求,加特兰为Andes提供了更为强大的性能和算力,当中不仅包含了能实现雷达信号超快速处理的RSP(Radar Signal Processor),运算速度高达23G MACs的DSP核,还提供了拥有超过2500 DMIPS计算能力的四核 CPU,让Andes在处理数据时更从容。
“Andes的RSP还可以通过指令,用软件代码去改变数据流程,改变加速器配置,实现新的算法,增加方案的灵活性。这和过去BBA固定数据流的设计方式有着天壤之别,符合当前软件定义汽车的大潮流”,刘洪泉强调。
同时,在客户和消费者都非常关注的网络安全方面,Andes芯片采用“安全岛”设计,支持常用加解密算法的硬件加速器,为用户的隐私保护和网络安全提供了技术保障。此外,针对4D成像雷达方案面临的开发复杂、落地周期长和成本高等问题,加特兰还支持“Ready-to-deploy”的交钥匙方案,为加速4D成像雷达在智能汽车上的广泛应用提供便利性。
“系统集成度的提高会带来可靠性方面的挑战,设计难度也会增加,能做到这种程度的公司不多,这也正是加特兰的强项之一,也是我们的技术优势所在。”刘洪泉总结说到。“这也让公司成为全球为数不多能提供SoC单芯片解决方案的供应商。”刘洪泉接着说。
过去十年的积累,让加特兰截止今年Q1,累计出货800万颗雷达芯片,公司的产品也已经进入到20余家车企,实现了超200款车型搭载。展望下一个十年,加特兰志在成为毫米波雷达芯片的全球领导者,推动毫米波雷达成为真正的普惠技术。
朝着这个目标,加特兰一方面针对汽车主动安全方面的应用推出产品。同时,加特兰也会针对智能家居、智慧养老、工业自动化和智慧城市这些方面的应用做产品布局,旨在让毫米波感知技术更好地服务人们的日常生活。
写在最后
虽然被一致看好,但从行业当前的现状看来,4D成像雷达依然面临着不小的挑战。
例如,为了提高雷达的分辨性,我们可以选择增加其工作频率。然而,由于雷达的频率受到法规限制,这不是可以轻易改变的。当然,我们也可以选择通过增加孔径大小的方式,获得更高的分辨率,但这样设计很容易会带来产品尺寸过大,难以散热且不易于集成于在保险杆上等的挑战。伴之而来的软件复杂性,也是4D成像雷达玩家不得不面对的另一道难题。
再叠加上应用本身对器件的高规格,4D成像雷达在汽车市场的普及不会是简单的事情。
但在陈嘉澍博士看来,在L2+部署的需求下,叠加市场上有车厂希望用4D成像雷达替代激光雷达的趋势,4D成像雷达在未来必然有巨大的成长空间。为此,供应商需要进一步降低雷达的成本,同时还需要提高4D成像雷达的探测能力。
这不但是加特兰的发展方向,也是所有4D成像雷达的共同目标。
责任编辑:sophie
相关文章
-

- 半导体行业观察
-

- 摩尔芯闻
最新新闻
热门文章 本日 七天 本月
- 1 NVIDIA重磅出击:三台计算机助力人形机器人飞跃
- 2 TSN芯片,上车!
- 3 汽车芯片需求激增,南芯科技加速推进“第二增长曲线”
- 4 奕行智能(EVAS Intelligence)完成数亿元A轮融资,加速推出RISC-V计算芯片产品,共同助力新时代到来
热门评论
©2023 半导体行业观察
Copyright©2023 上海爱思尔教育科技有限公司 皖ICP备19011903号-2 皖公网安备 34019202000656号