
简析石英MEMS陀螺仪在惯性导航系统的应用
石英MEMS陀螺仪的工作原理如图 1所示。石英MEMS惯性陀螺仪利用其关键敏感元件——双端石英MEMS音叉上的驱动电极(位于驱动叉指)和检测电极(位于检测叉指)来实现驱动模态的激励和检测模态信号的敏感性。在驱动电极上施加频率同驱动模态频率匹配的恒幅交变电压信号激励陀螺仪产生驱动模态下的振动。当有角速度ω输入时,在科氏效应的作用下,产生与输入角速度方向和振动方向垂直的科氏力,使音叉在检测模态下振动,在压电效应作用下,检测电极上产生输出信号。该信号经过滤波放大、同步解调和低通滤波放大等,输出的电压信号即为角速度信号。
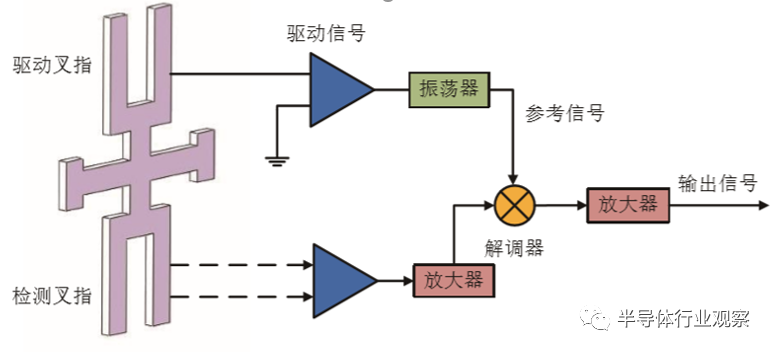
图 1石英MEMS陀螺仪的工作原理框图
目前,利用国内生产的石英MEMS陀螺仪(如图 2)已被用于研制惯性导航系统。惯性导航系统的部件组成如图 3。经过与高精度光纤惯导进行跑车对比试验,得到纯惯性解算姿态误差(30s,1σ)分别为滚转0.13°、偏航0.28°、俯仰0.22°,位置误差(30s,1σ)分别为X向10.56m、Y向2.45m、Z向8.19m的结果,验证了石英微机械陀螺仪组成的惯性导航系统的可行性。
图 2石英MEMS陀螺仪
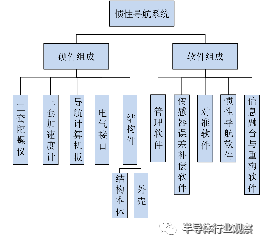
图 3惯性导航系统部件示意图
基于石英微机械陀螺仪的惯性导航系统,凭借其自身体积小、价格低、功耗低、环境适应性好以及在GNSS信号盲区或者复杂环境可提供持续可靠的定位的优点,非常适应在未来的各类信息化场景中各类载体的智能化、小型化和数字化发展的趋势。随着未来石英MEMS材料工艺与制造工艺不断提升,高精度石英MEMS陀螺仪必将在精确制导、无人车、商业航天和微型飞行器等领域起到极为重要的作用。
本文作者:北京晨晶电子有限公司 刘洋
*免责声明:本文由作者原创。文章内容系作者个人观点,半导体行业观察转载仅为了传达一种不同的观点,不代表半导体行业观察对该观点赞同或支持,如果有任何异议,欢迎联系半导体行业观察。
今天是《半导体行业观察》为您分享的第2879内容,欢迎关注。
推荐阅读
半导体行业观察

『 半导体第一垂直媒体 』
实时 专业 原创 深度
识别二维码 ,回复下方关键词,阅读更多
晶圆|集成电路|设备 |汽车芯片|存储|台积电|AI|封装
回复
投稿
,看《如何成为“半导体行业观察”的一员 》
回复 搜索 ,还能轻松找到其他你感兴趣的文章!
-

- 半导体行业观察
-

- 摩尔芯闻
最新新闻
热门文章 本日 七天 本月
- 1 可验证AI开启EDA新时代,引领半导体产业变革
- 2 OPPO全旗舰新品发布,定档10月24日!
- 3 2024 OPPO开发者大会:携手共建人人可参与的AI新世界
- 4 SEMI:未来两年半导体市场持续增长,中国成最大助力
热门评论
©2023 半导体行业观察
Copyright©2023 上海爱思尔教育科技有限公司 皖ICP备19011903号-2 皖公网安备 34019202000656号