
产业新风口:NVIDIA为人形机器人开发注入强大引擎
2025-01-08
15:35:55
来源: 杜芹
点击
未来二十年,人形机器人市场预计将达到380亿美元,这一庞大市场需求正在吸引全球科技巨头加速布局。今日,NVIDIA 创始人兼首席执行官黄仁勋在 CES 大会上宣布推出一系列创新技术,旨在通过其机器人基础模型、数据管线和仿真框架,全面加速下一代人形机器人的开发。这些技术的发布不仅将满足工业和制造业领域对人形机器人的巨大需求,还为整个机器人产业带来了全新的可能性。
NVIDIA Isaac GR00T:重新定义机器人模仿学习
NVIDIA创始人兼首席执行官黄仁勋在CES上宣布推出NVIDIA Isaac GR00T Blueprint,一款专为合成运动生成设计的工具,旨在为人形机器人开发者提供海量的合成运动数据。这项技术结合模仿学习方法,使机器人能够通过观察和模仿人类专家的行为来掌握新技能。
模仿学习是机器人学习的重要领域,传统上需要依赖广泛且高质量的真实世界数据集。然而,这些数据的收集过程往往繁琐、昂贵且耗时。Isaac GR00T通过合成运动数据生成,显著降低了开发成本与时间。
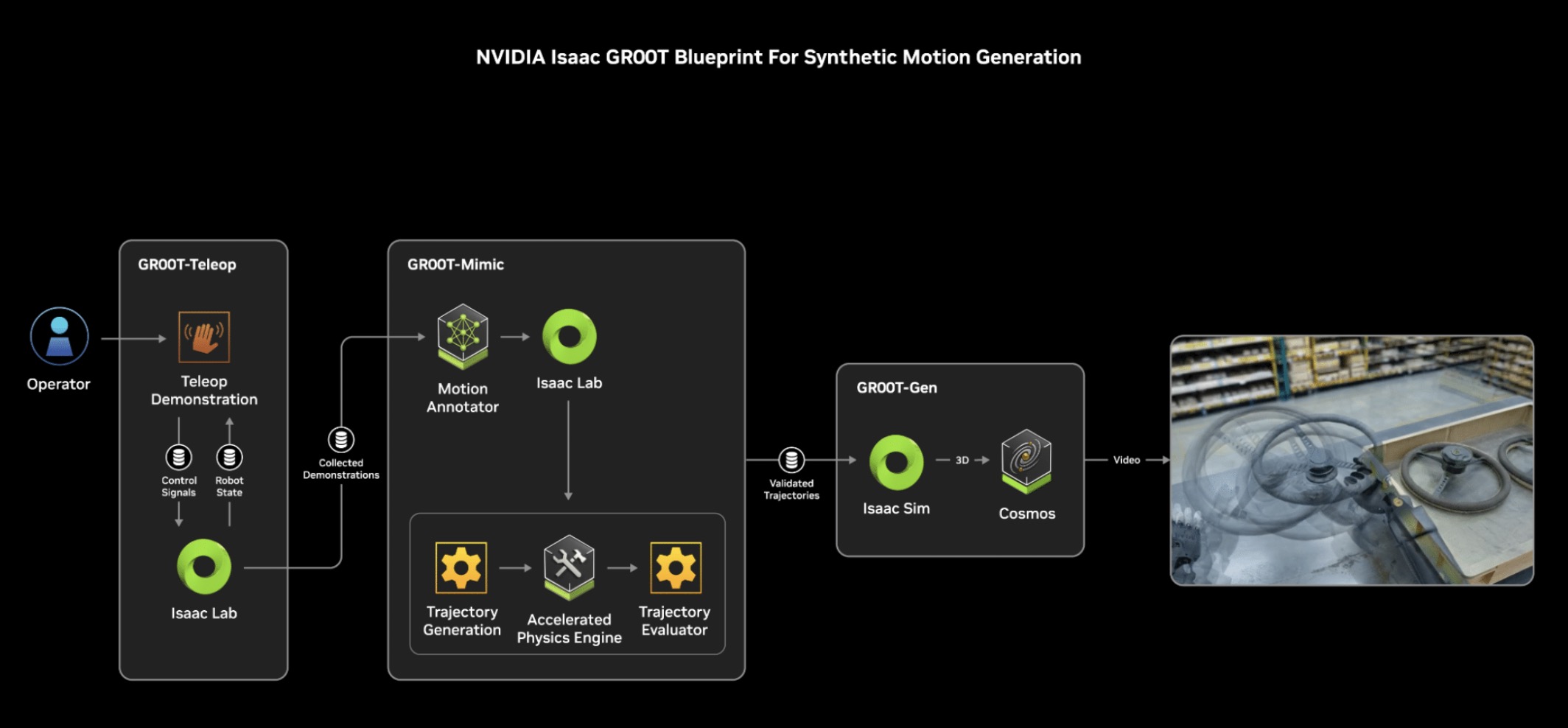
具体而言,Isaac GR00T包含三大核心工作流:
GR00T-Teleop工作流:利用 Apple Vision Pro 捕捉人类动作。开发者可以在数字孪生环境中录制金标准的人类动作数据,这些数据将作为机器人的模仿学习基础。
GR00T-Mimic工作流:扩展捕捉到的人类动作数据,并生成大规模的合成运动数据集。
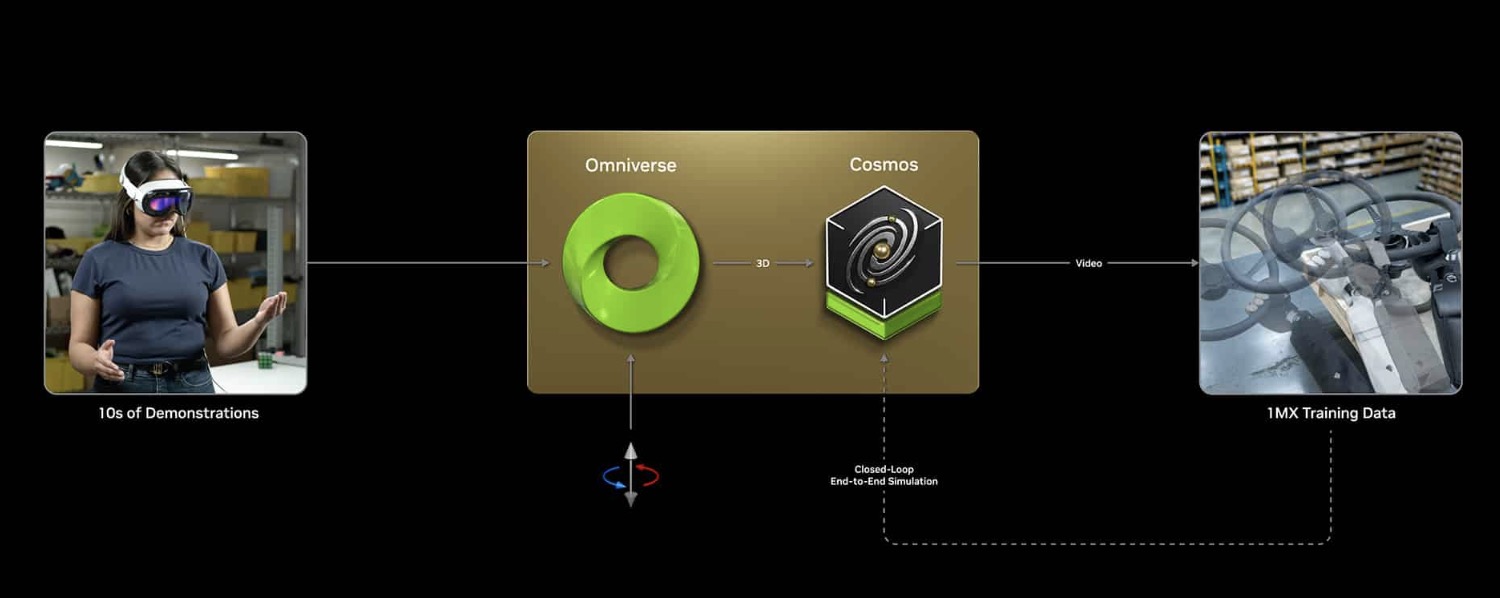
GR00T-Gen工作流:借助 NVIDIA Omniverse 和 Cosmos 平台,通过域随机化和 3D 提升技术,指数级扩增数据集,以支持更复杂的机器人策略开发。
最终,这些数据集将在 NVIDIA Isaac Lab 中为机器人学习提供输入,帮助其掌握高效、安全的环境交互和移动技能。
Cosmos平台:缩小仿真与现实的差距
为了更进一步优化人形机器人的学习过程,NVIDIA同时推出了Cosmos平台,一个支持生成物理感知视频和世界状态的开放性预训练世界基础模型。Cosmos 的核心优势在于其基于 1800 万亿个数据单元训练的大规模模型,这些数据涵盖自动驾驶、无人机、机器人拍摄的视频及合成数据,具有以下特性:
1)多样化模型支持:包括自回归模型和扩散模型,适用于多种输入数据格式。
2)仿真与现实融合:通过将 3D 图像扩展为逼真的真实场景,Cosmos 在仿真与现实之间架起桥梁。
3)与 Omniverse 集成:通过高度可控的仿真,Cosmos 提供了可靠的工具来减少传统世界模型中的幻觉问题。
这种集成大幅提高了仿真环境的可靠性和现实感,为物理 AI 的开发提供了强有力的支持。
全球生态系统的扩展
NVIDIA的新工具链已经开始在行业中掀起波澜。波士顿动力(Boston Dynamics)和Figure等领先机器人公司已将Isaac GR00T应用于实际开发,并展示了早期成果。
为推动生态系统进一步发展,NVIDIA还推出了人形机器人开发者计划,邀请全球硬件、软件制造商和机器人厂商加入,共同探索人形机器人技术的未来。
结语
随着市场规模的增长和技术壁垒的降低,NVIDIA 的 Isaac GR00T、Omniverse 和 Cosmos 正成为推动物理 AI 和人形机器人创新的关键力量。这些工具的发布不仅填补了传统机器人开发中的关键空白,也为行业构建了一个开放、协作的创新平台。
未来,随着更多企业加入 NVIDIA 的开发生态,下一代人形机器人有望在工业制造、物流运输、医疗护理等领域发挥更加重要的作用,从而彻底改变我们的工作与生活方式。
责任编辑:sophie
相关文章
-

- 半导体行业观察
-

- 摩尔芯闻
最新新闻
热门文章 本日 七天 本月
- 1 全球首款NFC PSSD亮相CES 2025,江波龙创新产品备受业界瞩目
- 2 合见工软,完成近10亿元新融资
- 3 ASML的投资者日,透露了哪些行业发展趋势?
- 4 AMOLED行业核心模具,精密金属掩膜版国产技术攻克核心瓶颈
热门评论
©2023 半导体行业观察
Copyright©2023 上海爱思尔教育科技有限公司 皖ICP备19011903号-2 皖公网安备 34019202000656号